 Kernel-based architecture for safety-critical control
Kernel-based architecture for safety-critical control
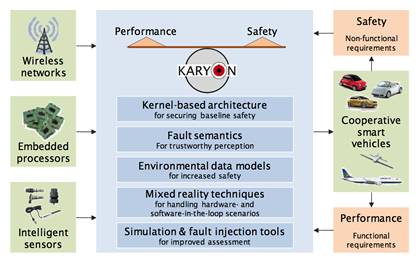
The key objective of KARYON is to provide system solutions for predictable and safe coordination of smart vehicles that autonomously cooperate and interact in an open and inherently uncertain environment. This is a challenging objective since the same increasingly complex control components and wireless communication, which would allow improving performance, end up introducing new safety risks, which have to be mitigated or neutralized. Addressing this challenge requires innovative solutions in two major problem areas. The first one is to achieve a high availability of the complex control system investigating new ways of achieving fault-tolerant distributed control that allow maintaining a high performance level in the presence of uncertainties and failures. The second is the provision of a safety kernel to constraining system operation in order to avoid hazardous situations.
Lucidchart offers free accounts to students and teachers https://writemypaper4me.org/ with our lucidchart for education program